Introduction
This week wraps up our field navigation exercises out at the Priory where we have learned two different types of navigation over the past three weeks: map/compass and GPS. This week we are combining the two methods in order to navigate all three of the courses which means we will be looking for a total of 15 points this week. We were allowed to make new 11" x 17" two sided maps to use for the exercise and then we also brought along our GPS units we used the prior week in order to mark waypoints at each of the flag locations. Another element was added this week to make the navigation a little more interesting. The new element introduced was paintball guns! Each person was issued a Tippman A-5 paintball gun with a hopper full of balls, CO2 tank, and mask. Once again, we retained our groups we have been in during the course of the field navigation exercises. With six teams of three, we would be allowed to choose any route we wanted to find the flag locations, which meant that contact with other teams would be highly likely. The weather for this exercise was excellent with sunny skies and temperatures in the high 30's. The snow levels were around the same as the prior week but this time snowshoes were available for use.
Location
As mentioned above, the final navigation course was held at the Priory, located in Eau Claire, WI, the same location we have been to the last two weeks.
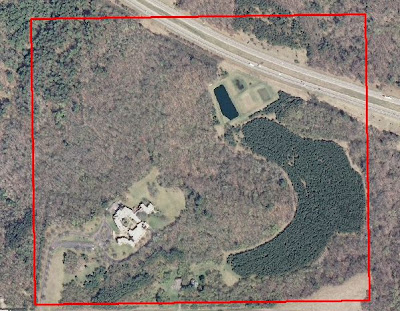 |
| Fig. 1 - The Priory exercise boundary. |
The benefit of coming back to this location is that it is pretty familiar by now. We have navigated different parts of the course and know what to expect as far as terrain goes at any point within the exercise area. The area has proved itself to be quite challenging with large elevation changes and dense, wooded areas in parts as well. This familiarity should be beneficial to allow us to navigate all 15 points within the three hour class period. All of the flag locations will hold the same coordinate locations as well. We already have the sheet containing the coordinates in UTM of all 15 flags.
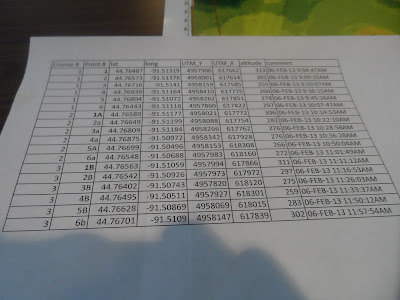 |
| Fig. 2 - Coordinates for all 15 flag locations. |
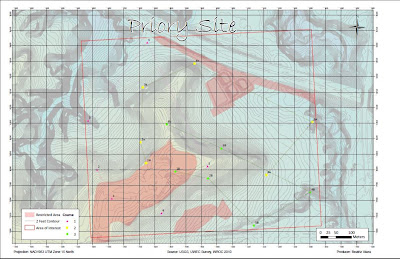 |
| Fig. 3 - Group map for the final navigation exercise. |
Methodology
After everyone got to the location around 3:00 PM, we assembled around a small area to get all of the paintball equipment set up and get briefed on what was expected for the field outing. Once all of the equipment was pieced together, it was then passed out to the members of the class. Most people were already familiar with shooting a paintball gun while others took the time to fire off a few practice shots to get the feel for it.
.jpg) |
| Fig. 4 - Tippman A5 paintball gun used in exercise. |
Snowshoes were also made available for this activity and maybe half of the students decided to use them. I chose not to use any snowshoes as I never had before and felt like they might just annoy me more than help me. The teams remained the same as they had for the previous weeks since we were now comfortable working and communicating with the members of our groups.
 |
| Fig. 5 - Group member list. |
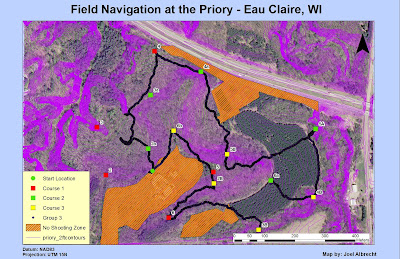
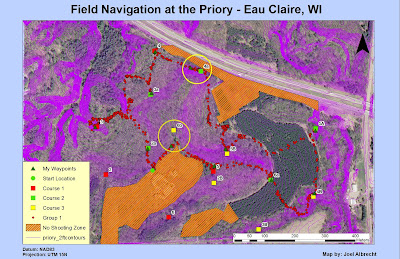
Each person had a Garmin etrex GPS unit which were to be used for (1) keeping a track log and (2) marking waypoints at each flag. The track log was set up to take a point every 30 seconds. Since all of the teams were gathered in one spot, we were given a three minute grace period to scatter around in the woods before any shooting could begin. We also needed to get a distance away from the Priory building, which serves as a daycare, before we could start shooting as well as not to get the SWAT team called on us. On our maps, we delineated an area around the building and another facility in the area that we deemed as a "No Shooting" zone.
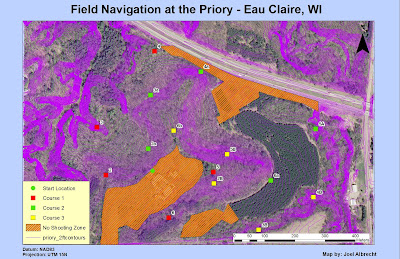 |
| Fig. 6 - "No Shooting" zones with course points and elevation. |
After the three minute window had passed, my team decided to tackle the points from Course 1 and Course 2 first since they were just below the starting location. We managed to get one of the flags (2a) right away with ease and no conflict. On our way to the second flag (3), we encountered some fire from Group 6 as they were on their way to the same point. We sent Kent down the steep ravine to get our card punched as we covered him with supporting fire. Eventually a truce was called upon since we were at a standoff and we were just waisting paintballs and time. Once we had that flag we grabbed flag 3a and then 4 at the northernmost extent of the area. From there we had to walk the steep grade of a hill to get 4a. We decided to leave flag 6b alone for the time since there was another team there who had spotted us so we hiked on over to get 5B. Shortly before we got to 5B, we noticed Group 2 climbing the hill to get it as well. We planned on ambushing them but did not get the chance to before they spotted us. We did not exchange fire but allied with them for awhile. After punching our card at 5B, we decided to grab 5A where we once again ran into Group 6 and a firefight broke out at the edge of the pine tree forest. After exchanging fire from behind skinny pine trees, two of us got hit by their paintballs so we had to sit for 3 minutes before moving on. We were able to then advance to 5A and then over to 4B. After 4B we went to 6A where we met up with Group 2 and Group 6. We exchanged in a short firefight until most of us ran out of paintballs. We then formed a "Mega Group" since we were just about out of time for the exercise. From there we walked to flag 5, dismissing 2B in order to get back in time. On our walk back to the start location, we all got 6b before getting back right around 6 pm. After the exercise, everyone uploaded their track logs into ArcMap in a public folder so everyone could access them. The track logs were then merged together by group members.
Results/Discussion
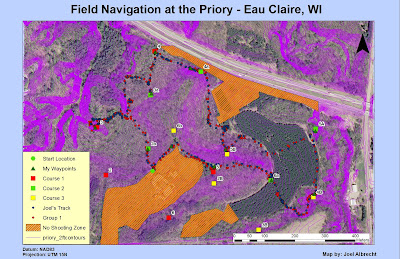 |
| Fig. 8 - My group's (Group 1) track log and my personal track log. |
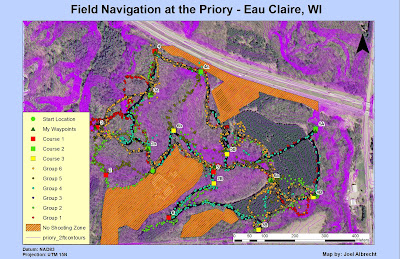 |
| Fig. 9 - Track logs for all of the groups. |
In Fig. 7, my track log is shown which gives a better idea of the path I took over the course of the exercise. My track log was turned on at 3:28 pm and turned off when I finished at 5:59 pm. Everyone elses track log times were very similar so I am not going to include those here. Looking at Fig. 8 then with my group's track log and my own laid over the top, it appears that I never really strayed away from my group, which was the case. For most of the exercise, we walked in single file rank the whole time and only spreadout somewhat during the firefights. We took very direct routes to each flag location most of the time. The exceptions would be from 3 to 3a where we took a roundabout way to avoid an ambush and then 4a to 5B because we were trying to ambush Group 2. Other than that, we didn't waste any time getting lost which was good. We should have grabbed flag 2B though since we were super close to it at point 5. Throughout the course exercise, my group only ran into two other groups, Group 2 and Group 6.
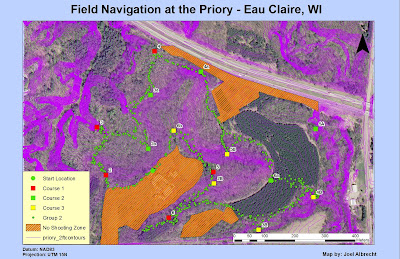 |
| Fig. 10 - Group 2's track log. |
Group 2's track log looks pretty confusing in some parts. It appears they managed to get every flag except for 5A. It looks like they may have gotten off track between 3 and 2a and also around 5B; but that is where they ran into us. It looks like they also walked way past point 6 as well, perhaps on their way back to the start location.
 |
| Fig. 11 - Group 3's track log. |
Group 3 got to all of the locations except for 2 and 3. It appears their routes were pretty accurate though. I noticed that there is a large break between 6a and 3B. I'm not sure where they started, but it suggests that they started at 3B or 6a perhaps which doesn't make much sense since they are so far away from the start location.
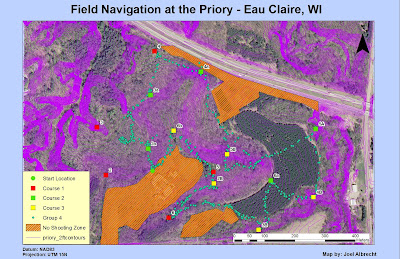 |
| Fig. 12 - Group 4's track log. |
Group 4 made it to all of the points except for 2 and 3 as well. It looks like they strayed off path between 2a and 3a and also around point 5. Perhaps this was due to conflict from other groups.
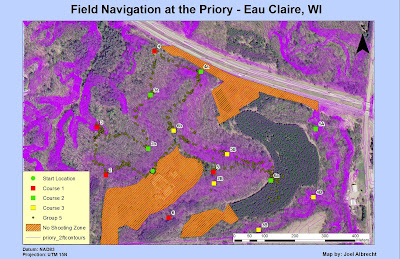 |
| Fig. 13 - Group 5's track log. |
Group 5 missed four points. These were points 3B, 4B, 5A, and 6. They had pretty good routes too except for around 6a where it looked like they got lost and gave up trying to find 3B or 4B.
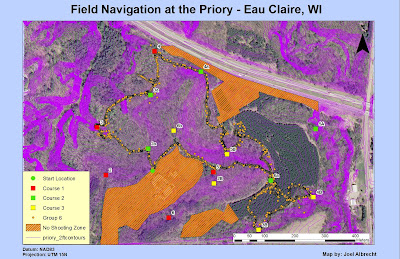 |
| Fig. 14 - Group 6's track log. |
Group 6 missed points 2, 6, 5A, and possibly 2B. I know they got 6b because we were in that area at the same time. The reason for the chaos by 3a is because this is where they engaged us in a firefight right away. We also encountered them around 5B in the forest which is why there is some chaos there as well. They must have encountered some conflict between 4B and 6a as well.
PDOP
This concept was covered in the previous blog post but needs to be mentioned in this post as well. Basically, the PDOP is the accuracy of a 3D position based on the number of
satellites and their geometry. A low PDOP indicates a very accurate position. A few of the factors which affect PDOP accuracy are: atmosphere, buildings, and trees. We took a waypoint at each point we went to and then overlaid them on the course points to see how accurately the GPS marked each location. Since this activity took place in an area with lots of trees, the GPS signal was being bounced off the trees and therefore throwing off the correct position of our waypoints in some spots. This is very evident at points 4a and 6b where the waypoint was placed a significant distance from the actual flag location. The GPS is enabled with a feature which helps correct this. The feature is called point averaging and how it works is that the GPS will take multiple points at a location and then average them out to minimize the effect of a high PDOP.
 |
| Fig. 15 - Map showing how PDOP involves positional accuracy. |
Conclusion
This exercise was a culmination of all the navigation skills we had learned in the past few weeks and gave us a chance to apply them to a course we had gained some familiarity with. In the end, the most effective navigation was by far the GPS. However, it was also very useful to have a paper map along which had an aerial image and contour lines for referencing while in the field. The map showed us the elevation changes we would encounter so that we could plan our navigation for the path of least resistance. Having an aerial image for a base map is also very beneficial to see the type of vegetation in the area and also for identifying landmarks in the event we weren't too sure where we were at. As far as navigation goes though, the map method was antagonizingly slow and inefficient compared to using the GPS. Running around with paintball guns added an extra variable to be aware of. Not only did the masks tend to fog up frequently, we had to be on the lookout for other teams as well which slowed up our navigation a bit. Group 2 probably performed the best based on all of the locations they made it to. No group made it to all of the flags though. It seems like everyone is by now very comfortable navigating with the methods we have learned.









































.jpg)










